웨어러블 로봇, 하지 불완전 마비 환자 재활에 활용
로봇 입고 걷기 쉽지 않았지만 적응… 스쿼트까지 도전
기기 불편함 보다 사람들의 시선 신경쓰여

◇웨어러블 로봇, 병원서 하지 불완전 마비 환자 재활에 활용
이날 기자가 착용한 제품은 엔젤로보틱스가 개발한 ‘엔젤렉스 M20’이다. 이 로봇은 보행 장애를 앓고 있는 하지 불완전 마비 환자를 대상으로 병원 내에서 평지·계단 보행 훈련과 스쿼트 훈련을 돕는다. 현재 세브란스재활병원과, 서울재활병원, 국립교통병원, 분당 서울대학교병원 등 전국 10여개 병원·복지관에 도입·활용되고 있다.
제품은 ▲마이크로프로세서를 기반으로 환자의 보행 의도를 파악하는 ‘백팩’과 ▲보행 능력을 분석하고 로봇의 보조력을 조절하는 ‘전용 태블릿’ ▲보행 데이터를 측정하는 ‘아웃솔’ ▲이를 기반으로 환자에게 정밀한 보조력을 제공하는 ‘구동기’ 등으로 구성됐다. 제품 무게는 성인 제품 기준 19.5kg며, 크기는 가로 약 40~50cm 세로 약 120~150cm다. 대형·소형으로 구분돼 아동과 성인 모두 착용할 수 있고, 의료진 판단 하에 보행 치료가 가능한 경우에만 사용한다.

로봇 착용을 위해서는 우선 신체 규격에 맞게 엉덩이·무릎관절 구동기와 어깨·허리 스트랩, 허벅지·종아리 지지대를 조절한다. 앉은 상태에서 로봇을 착용할 때 처음 길이를 조절하고 일어나서 한 번 더 조절하는 과정을 거친다. 앉았을 때와 일어났을 때 스트랩, 지지대 등의 위치가 달라질 수 있고 이에 따라 길이도 재조절이 필요하기 때문이다.


앉은 상태에서 제품 착용이 끝나면 태블릿에 이름, 성별, 생년월일, 질환 정보 등 환자 정보를 입력한다. 그날의 훈련 데이터를 저장하기 위함이다. 이어 환자 상태와 치료 목적 등을 고려해 작동 모드를 선택한다. 선택할 수 있는 모드는 ▲일어서기 ▲앉기 ▲평지보행 ▲계단오르기 ▲서있기 ▲스쿼트 등 총 6가지다. 각 모드에 따라 다리를 펼 때, 구부릴 때 가해지는 힘이 달라지며, 무게중심이 집중된 다리에는 버티는 힘을, 앞으로 나아가는 다리에는 밀어주는 힘이 들어간다. 예를 들어 ‘일어서기’ 모드의 경우 앉아있는 자세에서 엉덩이가 일정 높이 이상 올라가면 다리를 펴는 힘이 들어가고, 보행을 돕는 ‘평지보행’ 모드를 선택하면 한쪽 다리에 펴는 힘, 다른 한쪽 다리에는 구부리는 힘이 적용된다. 때문에 체중을 지지하고 있는 다리에 버티는 힘이 전해지고, 앞으로 나아가는 다리는 걸을 수 있도록 밀어주는 힘을 받게 된다.
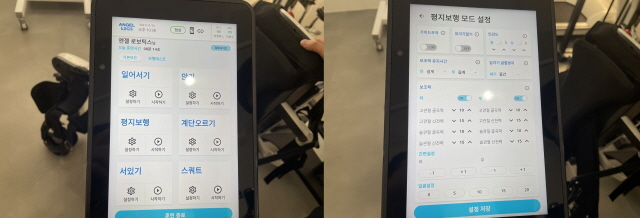
훈련 모드를 선택한 뒤에는 환자 상태에 맞게 세부 설정을 진행한다. 같은 훈련이라고 해도 환자에 따라 신전력(펴는 힘), 굴곡력(구부리는 힘) 등 로봇의 보조력이 더 많이, 또는 덜 필요할 수 있고, 좌·우 다리, 각 관절 부위마다 움직임을 위해 필요한 힘도 다르기 때문이다. 설정 화면에서는 로봇의 보조력 강도 외에 환자 움직임에 반응하는 ‘민감도’와 보조력 유지 시간, 즉 힘이 가해지는 시간도 정할 수 있다. 세부 설정은 훈련 중에도 수시로 조절 가능하다.
이 같은 과정은 현재 웨어러블 로봇 기술이 환자 상태에 맞춰 얼마나 민감하게 반응하는지 알 수 있는 대목이기도 했다. 실제 기자 역시 체험하는 시간 내내 로봇의 보조력 강도와 유지 시간 등을 조절했고 다리에 전해지는 미세한 힘(보조력)의 변화를 체감할 수 있었다. 엔젤로보틱스 임상응용담당 신길호 책임(물리치료사)은 “로봇이 도입된 병원과 사용하는 환자들로부터 받은 피드백들을 제품 개발·업그레이드에 계속해서 반영하고 있다”며 “이를 통해 로봇이 환자들의 작은 움직임이나 보행의도 등에도 민감하게 반응할 수 있게 됐다”고 설명했다.
◇로봇 입고 일어서기, 쉽지만은 않았다
모든 준비는 끝났다. 곧바로 일어나 걷고 계단을 오르는 등 본격적인 웨어러블 로봇 체험이 시작될 것으로 보였다. 그러나 생각과 달리 로봇을 입고 움직이는 것이 쉽지만은 않았다. 정확히 말하면 ‘로봇’만 준비가 끝난 셈이었다.
일어나는 것부터 문제였다. 생전 처음 두 다리가 아닌 다른 물건에 몸을 지지하고 일어나려고 하니 쉽게 일어나지지 않았다. 일어날 때 로봇으로부터 전해지는 힘 역시 어색하게만 느껴졌다. 처음 느낌은 보조를 받는다기보다, 잘 일어나고 걸을 수 있는데 누군가 뒤에서 미는 듯한 기분이었다. 한편으로는 넘어지진 않을까 걱정스러운 마음이 들면서 웨어러블 로봇 취재 과정에서 들었던 전문가의 말이 스치기도 했다. 오랜 시간 일어서지 못하고 걷지 못한 이들이 로봇을 입고 일어나 걷기 위해서는 신체적 훈련과 함께 심리적으로 공포감을 걷어내고 로봇에 대한 신뢰를 갖는 노력 또한 장시간 필요하다는 것이다. 실제 경험해보니 일어서는 것에 대한 기대만큼 두려움이 적지 않았다.

◇금세 로봇에 적응… 걷고 계단오르기까지 ‘클리어’
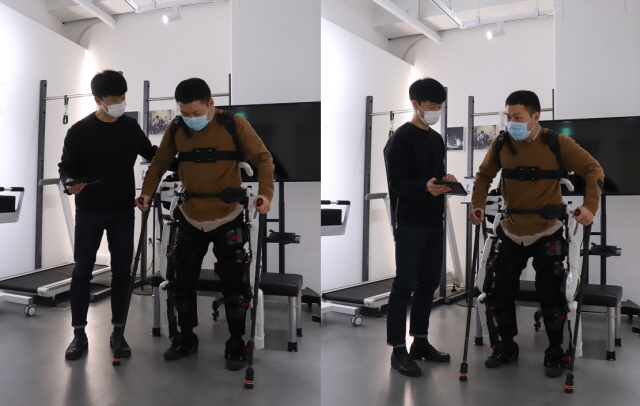
관계자들의 도움을 받아 자리에서 일어났고 건네받은 지팡이로 땅을 짚은 채 한 발을 내딛었다. 지팡이를 짚고 앞으로 조금씩 걸어 나갔지만 여전히 다리에 전해지는 힘도, 걸음걸이도 어색하게 느껴졌다.
몇 미터를 더 걸은 뒤 관계자들의 조언대로 몸에 힘을 조금 빼고 더 자연스럽게 걸어보기로 했다. 곧바로 효과가 나타났다. 걸음걸이가 자연스러워지고 로봇의 힘에 의해 걷는 것도 금세 익숙해졌다. 지팡이를 내려놓고 혼자 걷는 게 충분히 가능할 정도였다. 다만, 이는 기자의 보행능력에 따른 것으로, 실제 환자가 웨어러블 로봇을 이용한 보행재활 치료를 받을 경우 걷기까지 길게는 수개월이 소요되기도 한다.
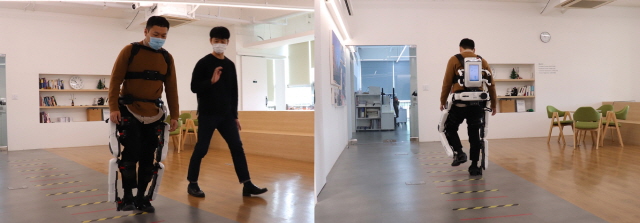
좀 더 걷자 자신감이 붙었다. 계단으로 자리를 옮겼다. 태블릿PC에서 ‘계단오르기’ 모드를 선택한 뒤 계단을 오르기 시작했다. 이 과정에서는 로봇의 힘이 좀 더 많이 느껴졌다. 힘이 들어가는 원리는 평지보행 때와 같았지만, 계단을 오르기 위해 다리를 들어 올릴 때마다 구동기에서 더 많은 힘이 전해졌다. 다리를 펴고 굽힐 때마다 다리 힘과 로봇 힘의 비율이 바뀌는데, 계단에서는 이 같은 변화가 좀 더 확연하게 체감됐다.


◇마지막 도전 ‘스쿼트’, 시작은 좋았는데…
잠시 숨을 돌린 뒤 오늘의 마지막 단계인 스쿼트 모드 체험에 나섰다. 스쿼트 모드는 환자의 다리 근력을 강화하기 위한 것으로, 일어서기와 앉기 모드를 조합해 만들어졌다. 일어설 때는 다리를 강하게 펴주는 힘이 전해지며, 반대로 앉을 때는 주저앉지 않도록 엉덩이와 무릎을 받쳐주는 힘이 제공된다. 백팩 무게로 인해 뒤로 넘어질 위험이 있기 때문에, 뒤에서 물리치료사가 받쳐주는 상태에서 지도에 따라 움직여야 한다.
실제 물리치료사로 활동 중인 신길호 책임의 지도하에 스쿼트를 시작했다. 설명대로 앉을 때와 일어설 때 엉덩이, 다리에 각각 버티는 힘과 밀어내는 힘이 느껴졌다. 일반 스쿼트 동작만큼 무릎을 굽히진 않았으나 훨씬 쉽게 스쿼트를 할 수 있었다. 3~4회 스쿼트를 한 뒤 방법을 터득했다고 생각해 혼자 시도해봤다. 그러나 로봇을 입고 혼자 하는 스쿼트는 쉽지 않았다. 원활한 로봇 사용을 위해서는 물리치료사의 도움이 반드시 필요하다는 것을 새삼 깨닫는 순간이었다.

웨어러블 로봇을 입고 움직이는 것이 편했던 것만은 아니다. 몸에 밀착된 기기와 무게로 인해 불편함도 느껴졌다. 다만 이 같은 부분은 물리치료사 지도하에 사용한다면 충분히 최소화할 수 있을 것으로 생각된다. 기업에서도 환자, 병원의 피드백을 바탕으로 계속해서 제품 편의성을 높이고 있다.
정작 불편했던 점은 따로 있었다. 자신도 모르게 의식하게 되는 사람들의 ‘눈’이었다. 기기가 내는 소리와 기기 그 자체만으로 이목을 끌기 충분하다보니, 아무도 쳐다보지 않지만 계속해서 시선을 의식하게 됐다.
웨어러블 로봇 상용화에 대비해 기술은 계속해서 발전되고 있다. 전문가들의 말대로 이제는 관련 제도 마련과 함께 사회적 인식 변화를 위한 노력이 필요한 때다.